{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
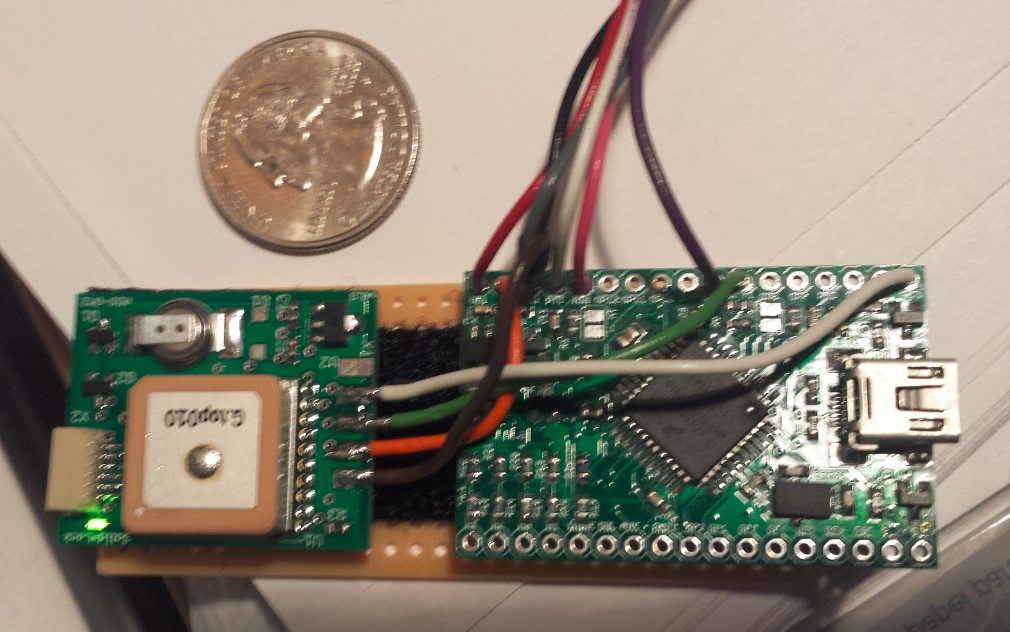
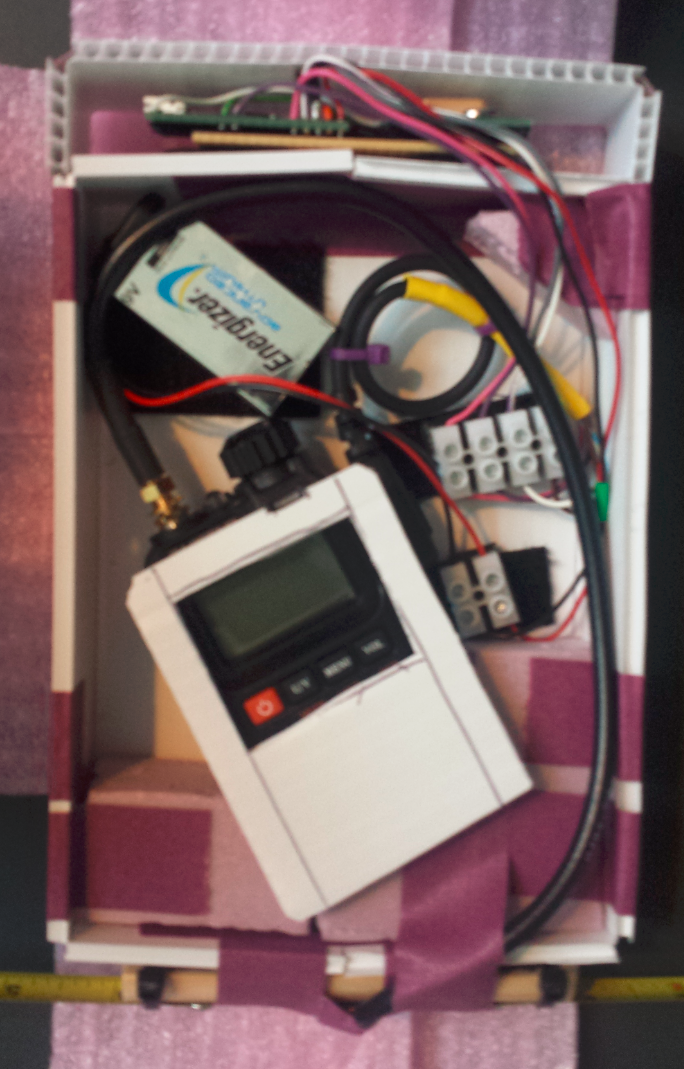
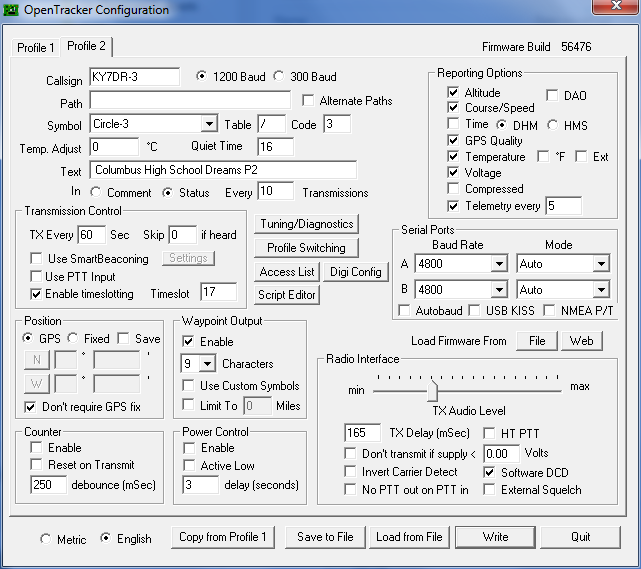
On 2014 Jul 23 a tracker I built was launched on a high-altitude balloon as part of the Columbus High School DREAMS science program (Columbus, GA). The tracker was built with an Argent Data T3-Mini with ADS-GM2 GPS and Baofeng UV-3R+ HT. It was configured with a profile for under 10,000 ft that transmitted position every 30 seconds with a path of WIDE1-1,WIDE2-1, and over 10,000 ft it transmitted position every 60 seconds with no path. Testing on the ground worked as expected.
The UV-3R+ radio ran on "low" power, so I'm guessing 1 watt or less (doesn't say in the specs that I have).
The T3-Mini was powered by a 9V Lithium (standard rectangular 9V battery package), and the T3-Mini provided 5V for the GPS. Packets report voltage and temperature on-board the T3-Mini, which has always read high (I presume due to the toasty little voltage regulator on the board).
Shortly after launch the packet rate increased dramatically, more than once per second, and I don't know why. The profile switch did eventually occur, but not when expected.
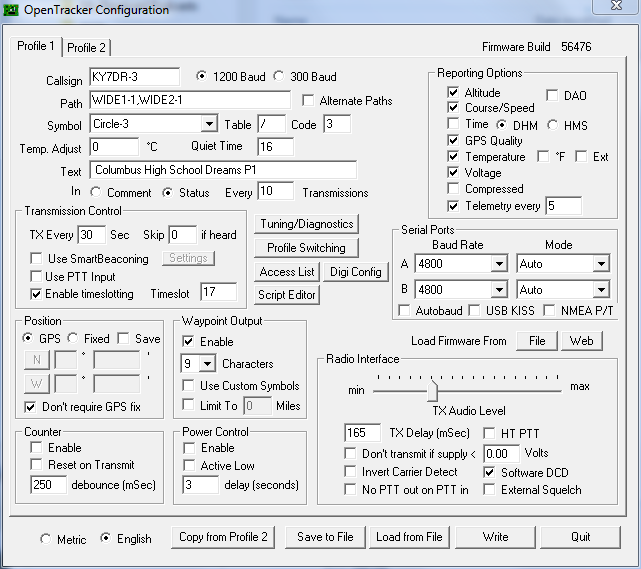
Here are screen shots of my T3-Mini configuration:
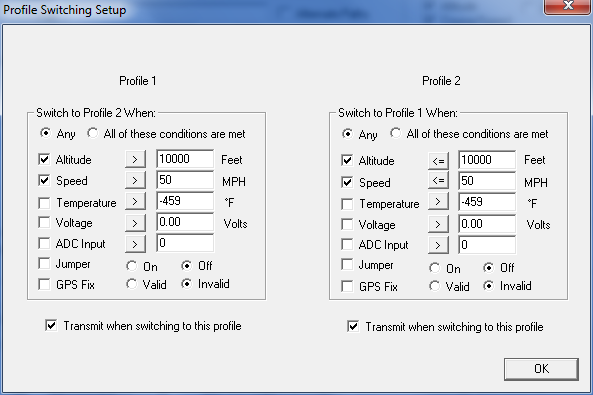
I think I've found a possible root cause of the packet diarrhea. In the profile switching I have two criteria: altitude and speed. Altitude was put in so that the balloon would use a conventional digi path while at low altitude and no digi path at high altitude. Speed was put in so that I could test the profile switching on the ground (in a car), which I should have done but did not do so thoroughly enough.
As the balloon rose, starting in profile 1, it gained speed and altitude. When its speed exceeded 50 MPH (but altitude still < 10k) it would switch to profile 2 and transmit. Now in profile 2 it would see that it's at an altitude of < 10k and immediately switch back to profile 1 and transmit. Profile 1 would then switch back to profile 2 and transmit, which would switch back to profile 1 and transmit, and so on, until the system exceeed 10k feet in altitude. As long as it was < 10k feet in altitude and < 50 MPH it was fine, and as long as > 10k feet and > 50 MPH it was fine. But when it met one but not both criteria, it would start rapidly flipping back and forth, transmitting each time. Bah.
While that seems plausible, the speed indicated in the raw data (link below) doesn't seem to support this theory.
Also the tracker was set to report NOFIX if it lost GPS, which it did for most of the middle of the flight. It was working when it took off and working when it landed (or else we may never have recovered it), but for much of the middle of the flight it reported NOFIX.
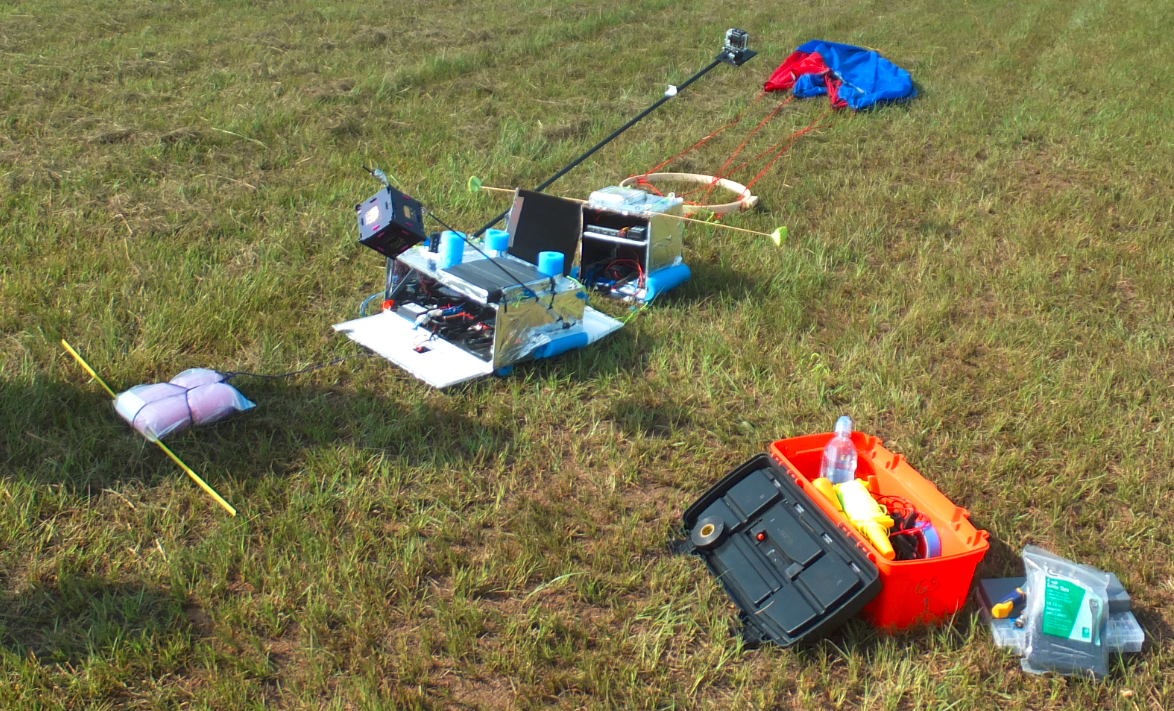
During actual flight the tracker was in several "phases" of behavior, most of them unintended. Here are some interesting events in the flight.
Here is a bunch of raw packets as harvested from aprs.fi. It's not complete, but it's something.
Here is a bunch of raw packets as logged by a friend's ground station (in a vehicle) that was on the same chase (but not in the immediate area of the landing).
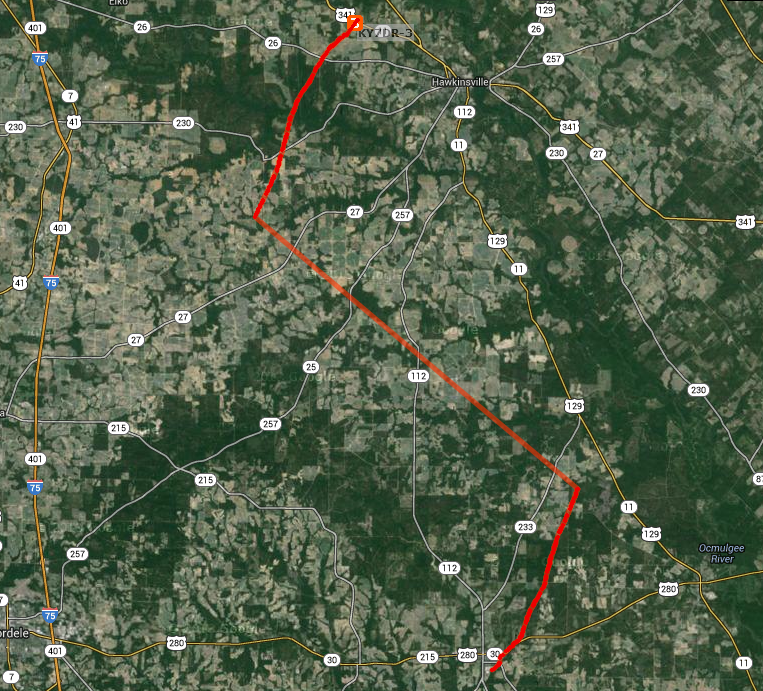
Screen grab of flight path, from http://aprs.fi/:
Release point (approx): 31° 56.56' N, 83° 27.07' W
Recovery point (approx): 32° 19.21' N, 83° 32.47' W